
REGULATOR JAZDY RJ-99
OGÓLNA CHARAKTERYSTYKA

|
| rys.1. Regulator Jazdy RJ-99 |
Cyfrowy Układ Zadawania i Kontroli Prędkości maszyny wyciągowej typu RJ99 -Regulator Jazdy - jest urządzeniem odpowiedzialnym za bezpieczną i efektywną jazdę maszyny wyciągowej. Spełnia wszystkie przepisy Załącznika nr 17 do Rozporządzenia Ministra Przemysłu i Handlu z dnia 14 kwietnia 1995 r. w sprawie bezpieczeństwa i higieny pracy, prowadzenia ruchu oraz specjalistycznego zabezpieczenia przeciwpożarowego w podziemnych zakładach górniczych (Dz.U. nr 67 poz. 342 ) wraz ze zmianami wprowadzonymi przez Ministra Gospodarki z dnia 1 grudnia 1997 r. (Dz. U. Nr 3 poz. 6). Stanowi zespół urządzeń realizujący następujące funkcje:
- tworzenie wartości prędkości zadanej (2) maszyny w funkcji drogi przebywanej przez naczynie wyciągowe
- tworzenie obwiedni ograniczenia prędkości i obwiedni kontroli prędkości (6) w funkcji drogi
- wskazanie położenia (5) naczyń w szybie w formie:
- diodowego wskaźnika głębokości - linijka
- cyfrowego wskaźnika głębokości
- łączników drogowych (przekaźników załączanych w funkcji położenia naczynia )
- kontrolę prędkości (3)
- ciągłą
- w wybranych punktach
BUDOWA
|
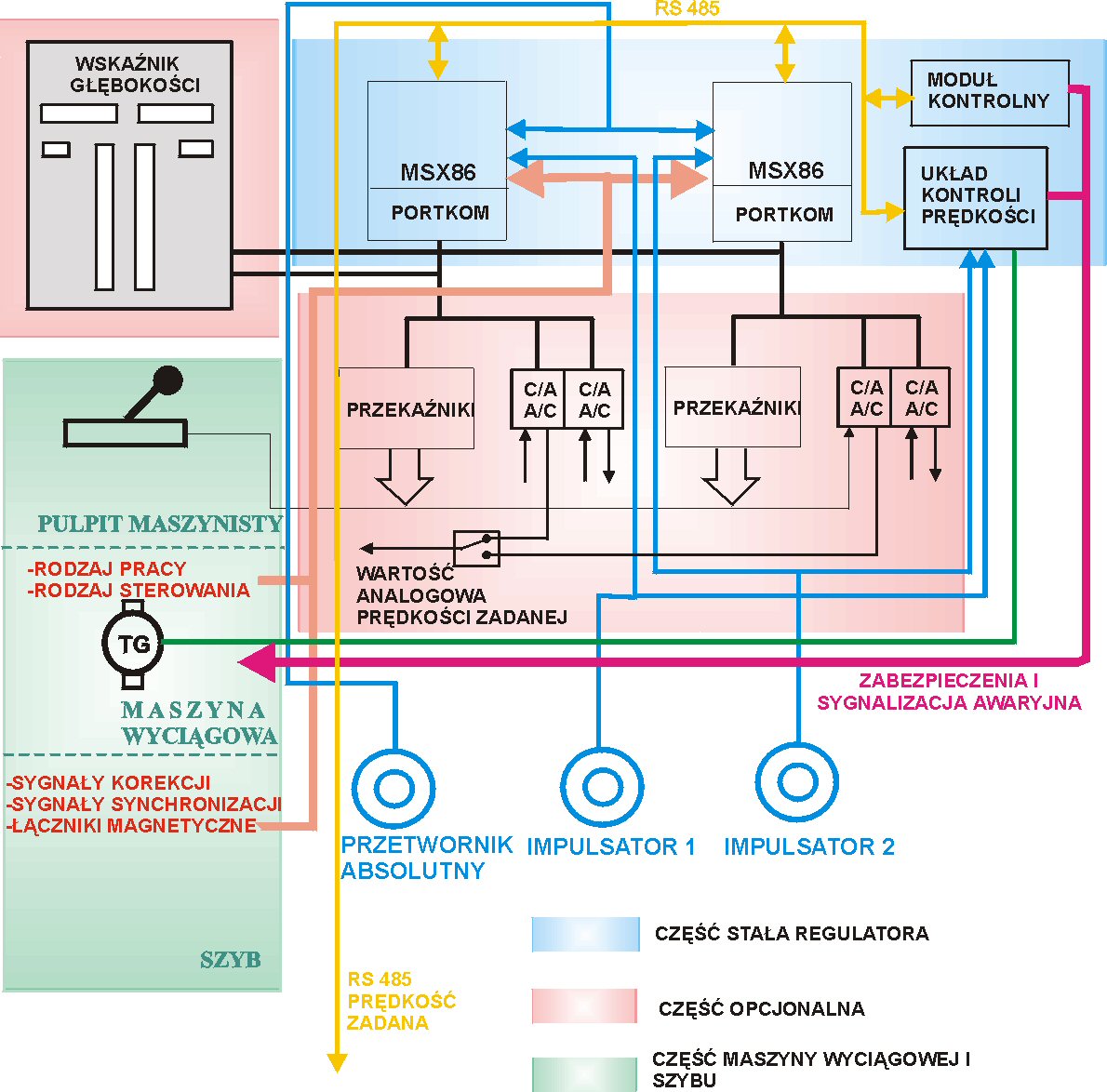
| rys.2. Schemat blokowy Regulatora Jazdy RJ-99 |
- regulatorów MSX86 (1)- oddzielnie po jednym dla każdego naczynia
- układu kontroli prędkości typu MARK
- modułu kontrolnego
- zespołu elementów odwzorowania drogi: przetwornika absolutnego i 2 przetworników inkrementalnych oraz zestawu modułów peryferyjnych, stosowanych w zależności od potrzeb:
- wskaźnika głębokości
- przekaźników drogowych w zestawach po 8 lub 16
- przetworników cyfra/analog - analog/cyfra (C/A-A/C )
REGULATOR MSX86

|
| rys.3. Wygląd części czołowej regulatora MSX86 |
Każdy regulator MSX86 przeznaczony jest do współpracy z jednym naczyniem. Główną funkcją regulatorów MSX86 jest tworzenie wartości prędkości zadanej maszyny (diagramu jazdy (2)) w funkcji drogi przebywanej przez naczynie wyciągowe. Do określenia miejsca aktualnego położenia naczynia w szybie służą przetworniki impulsowo - obrotowe - po jednym dla każdego naczynia, przetwornik absolutny wspólny dla obu naczyń oraz zespół nadajników sygnału położenia do korekcji stanu elementów odwzorowania drogi.(Nadajnikami położenia mogą być np. łączniki magnetyczne zabudowane w szybie). W celu ułatwienia obsługi każdy regulator MSX86 wyposażony jest w panel operatorski z ekranem ciekłokrystalicznym i prostą klawiaturą, który służy do parametryzacji (4) oraz testowania.
DIAGRAM JAZDY
Diagramy jazdy - krzywe jazdy - są to tablice tworzone w pamięci regulatora, w których zapisana jest prędkość maszyny wyciągowej na każdym decymetrze drogi naczynia. Tworzone są dynamicznie na początku cyklu z uwzględnieniem:
- zaprogramowanych w trakcie parametryzacji (4) punktów charakterystycznych oraz przyspieszeń i opóźnień
- rodzaju pracy wyciągu i rodzaju sterowania maszyny
- miejsca startu i celu jazdy.
Na podstawie wartości odczytanych z tablicy krzywej jazdy w konkretnym miejscu w szybie każdy z regulatorów MSX86 wypracowuje w sposób niezależny sygnał prędkości zadanej. Sygnały z obydwu regulatorów MSX86 są porównywane ze sobą w module kontrolnym MK i następnie jeden z nich jest wybierany za pomocą przełącznika i wyprowadzony z Regulatora Jazdy RJ99 poprzez moduł przetwornika C/A-A/C lub bezpośrednio, w sposób cyfrowy, szeregowo lub równolegle.
KONTROLA PRĘDKOŚCI
Regulatory MSX86 realizują algorytmy ciągłej kontroli prędkości oraz kontroli prędkości w wybranych punktach oraz inne zabezpieczenia kontrolujące poprawną pracę wyciągu i zespół testów autokontrolnych. Układ Kontroli Prędkości KP (MARK) w sposób niezależny realizuje ciągłą i punktową kontrolę prędkości wraz z kontrolą opadania wzorca na drodze zwalniania. Do określania położenia naczyń w szybie wykorzystuje wspólne przetworniki impulsowo-obrotowe I1 i I2 oraz dodatkowo tachoprądnicę TG służącą do kontroli. Oprócz algorytmu kontroli prędkości realizuje również szereg innych zabezpieczeń.
PARAMETRYZACJA
Regulatory MSX86 wyposażone są w panele operatorskie z wyświetlaczami ciekłokrystalicznymi dla celów parametryzacji i diagnostyki. Parametry szczegółowo określające sposób działania regulatorów MSX86 mogą być definiowane przez użytkownika. Należą do nich:
- rozmiary szybu oraz ilość i miejsca zamontowania nadajników sygnału położenia,
- rodzaj i średnica nośnika liny,
- prędkość maksymalna i zryw,
- wartości przyspieszeń i opóźnień dla poszczególnych rodzajów pracy oraz punkty charakterystyczne (prędkości oraz miejsca rozpoczęcia
- przyspieszania i zakończenia zwalniania) dla obliczenia diagramów jazdy,
- punkty zadziałania przekaźników drogowych
WSKAZANIE POŁOŻENIA
Wyświetlanie położenia odbywa się na wskaźniku głębokości (WG) składającym się z modułów wyświetlaczy paskowych i cyfrowych. Wskaźnik głębokości przeznaczony jest do zamontowania w pulpicie maszynisty. Odrębnie wykonano moduł przekaźników drogowych - PD jako element wskaźnika głębokości. Urządzenie posiada zestaw 8, 16, 24 lub 32 przekaźników drogowych określających w zależności od potrzeb użytkownika punkty lub strefy położenia naczynia w szybie.
OBWIEDNIE: OGRANICZENIA PRĘDKOŚCI I KONTROLI PRĘDKOŚCI
|
|
rys.4. Sposób tworzenia obwiedni ograniczenia i kontroli prędkości |
Krzywa ograniczająca - obwiednia ograniczenia prędkości - służy do ograniczania wartości zadanej prędkości oraz do kontroli poprawności obliczania krzywych jazd. Jest ona tworzona jednorazowo, w momencie inicjalizacji pracy regulatora, i jest wspólna dla wszystkich rodzajów pracy wyciągu i niezależna od rodzaju sterowania. Obwiednię ograniczającą definiuje się za pomocą zaprogramowania punktów charakterystycznych tej krzywej podając odpowiednio współrzędne położenia i prędkości dla tych punktów. Program obliczający krzywą obwiedni ograniczającej łączy te punkty odcinkami prostych otrzymując w ten sposób linię łamaną definiującą wzorzec ograniczenia prędkości w całej drodze przejazdu z rozdzielczością 10 cm. Sposób tworzenia obwiedni ograniczenia prędkości , obwiedni kontroli prędkości i wzorca krzywej jazdy jest pokazany na rysunku 4.
|
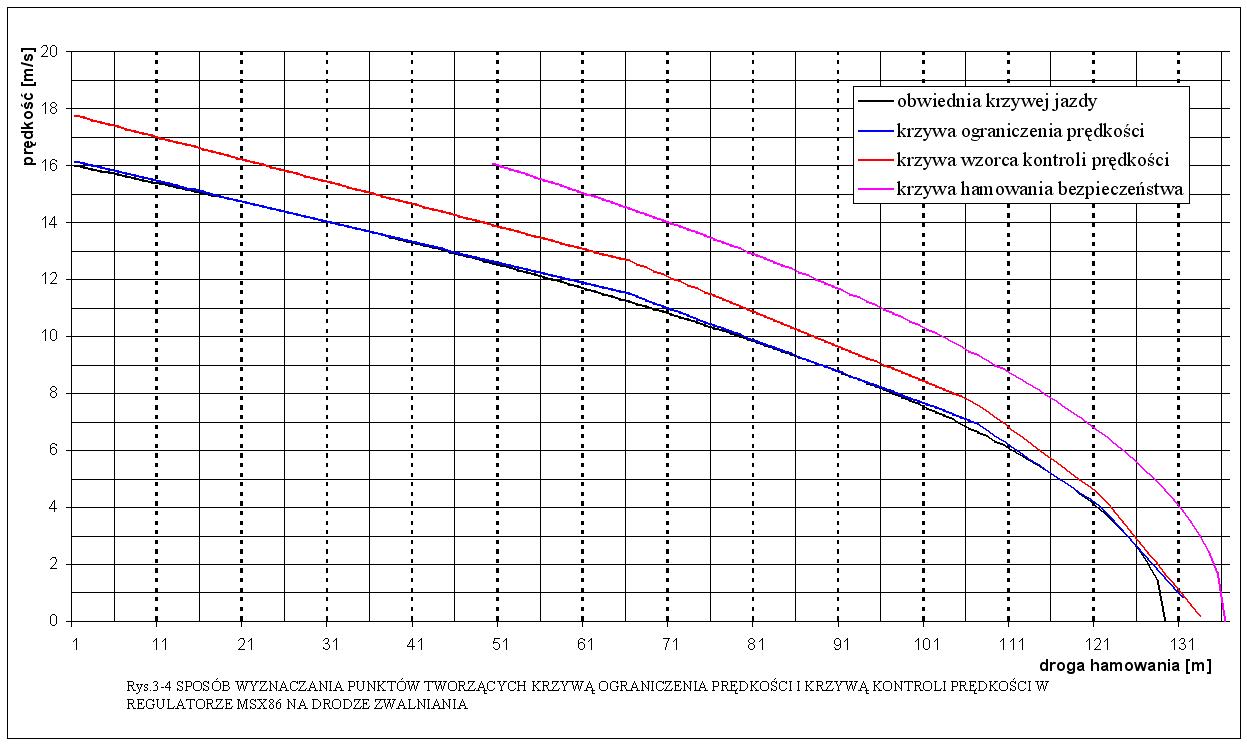
| rys.5. Sposób doboru punktów obwiedni ograniczenia i kontroli prędkości |
Obwiednia kontroli prędkości służy do realizacji ciągłej i punktowej kontroli prędkości. Jest ona tworzona jednorazowo, w momencie inicjalizacji pracy regulatora, i jest wspólna dla wszystkich rodzajów pracy wyciągu i niezależna od rodzaju sterowania. Obwiednię kontroli prędkości tworzy się z krzywej obwiedni ograniczenia prędkości w sposób matematyczny poprzez przemnożenie każdej wartości prędkości przez stałą liczbę. Wartość mnożnika może być ustalona indywidualnie dla danego wyciągu szybowego i może być wybrana z zakresu od 1.08 do 1.15. W celu zachowania skuteczności kontroli prędkości na drodze zwalniania punkty definiujące krzywą ograniczenia prędkości muszą być tak dobrane , aby odpowiadające im (a wyliczone matematycznie) punkty krzywej kontroli prędkości leżały poniżej krzywej hamowania bezpieczeństwa. Sposób doboru współrzędnych tych punktów ilustruje rysunek 5.
Na rysunku ukazano (kolor czarny) obwiednię krzywej jazdy, która ma kształt paraboli. Krzywa ta leży nieznacznie "ponad" krzywą jazdy tworzoną przez regulator , gdyż do jej narysowania nie uwzględniono miejsc zrywu. Obwiednia ograniczenia prędkości (przedstawiona na rysunku w kolorze ciemnoniebieskim) utworzona jest z odcinków stycznych do obwiedni krzywej jazdy. Punkty przecięcia tych stycznych są punktami, których współrzędne wprowadzamy programując obwiednię ograniczenia prędkości. Obwiednia kontroli prędkości (krzywa w kolorze czerwonym) utworzona jest przez regulator matematycznie w sposób opisany powyżej. Jeżeli krzywa ograniczenia prędkości (ciemnoniebieska) dostatecznie dobrze przybliża obwiednię krzywej jazdy, wówczas obwiednia kontroli prędkości leży "poniżej" krzywej hamowania bezpieczeństwa (kolor różowy) zachowując dla wszystkich prędkości na drodze zwalniania wystarczający margines bezpieczeństwa uwzględniający czas reakcji hamulca (ok.1,5 s)
BEZPIECZEŃSTWO PRACY
W celu zapewnienia bezpieczeństwa Cyfrowy Układ Zadawania i Kontroli Prędkości Regulator Jazdy RJ99 posiada:- zdublowany regulator MSX86, z których każdy wykonuje dla swojego naczynia niezależne odwzorowanie położenia i obliczanie prędkości zadanej,
- układ kontroli prędkości KP wykonany wg innej technologii i wyposażony w inne niż regulatory MSX86 oprogramowanie,
- moduł kontrolny MK sprawujący nadzór nad łączem powiązującym ze sobą trzy główne urządzenia Regulatora Jazdy RJ99 w celu kontroli zgodności ich pracy.
